CoCoSim
Project Summary #
Cyber Physical Systems (CPS) are systems that integrate computation, networks and physical processes, with feedback loops where physical processes impact computational processes and vice versa. Experimenting with SCFs involves a number of important challenges; some of them, for example, the scale, the cost of the equipment, or the time inherent to the physical processes, generate the need for a modeling and simulation environment in which to test and validate developments related to SCFs.
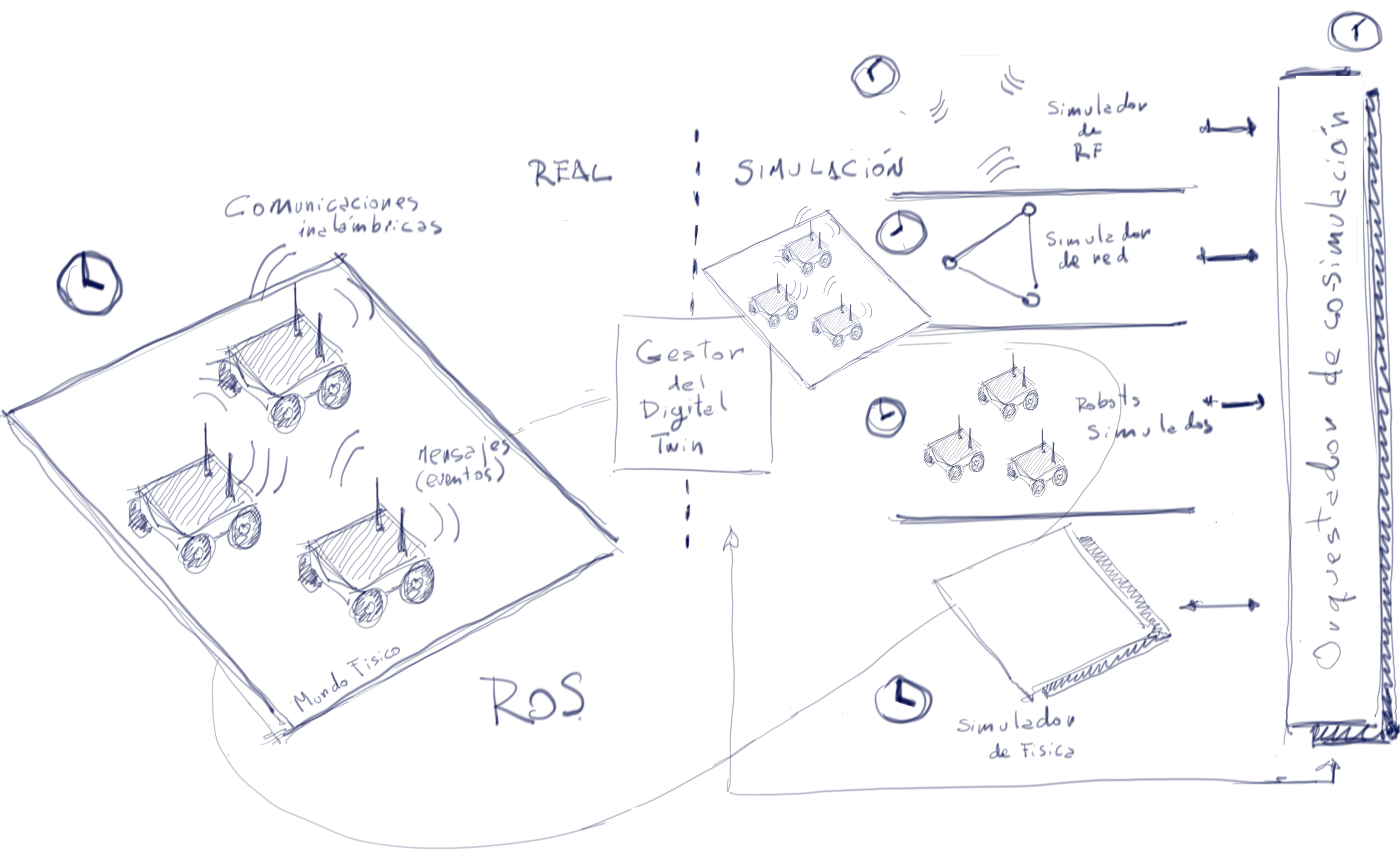
The simulation of a system that integrates physical, software and communication network aspects by composing different simulators specific to each of these areas is often called co-simulation. In a co-simulation each individual simulator is seen as a black box capable of implementing a certain behavior, consuming inputs and producing outputs. To achieve this composition it is necessary to manage the exchange of information between the different platforms, as well as to synchronize their execution. These aspects have been addressed directly or indirectly in various areas, but the results are always specific to the domain in which they have been developed. Moreover, the relatively recent emergence of the idea of digital twins, which offer a novel way to test the impact of different control decisions in a simulated virtual environment without the need for changes in the physical system, has made the theoretical and practical challenges presented by co-simulation relevant again.
This project aims to study the SCF co-simulation problem in general but with a specific focus on the co-simulation problem and digital twins for cooperative mobile robot systems with wireless communication. For this it will be necessary to deepen both the theoretical aspects of hybrid system simulation (modeling physical and computational systems) and the practical implementation aspects of these co-simulation platforms, but with special emphasis on the latencies induced by the different simulators involved and the overall simulation speed. In addition to the expected theoretical results, they will be translated into a co-simulation platform that will serve as a common basis for the cooperative mobile robotics research of the applicant group.